
Our working group focuses on researching and developing sensors and robotics for healthcare. Some of the key projects under this working group include:
- Self-powered sensors that can be worn on the skin, eliminating the need for external power sources.
- Smart, non-invasive throat sensors using ionic polymer-metal composite (IPMC) material and a support vector machine algorithm.
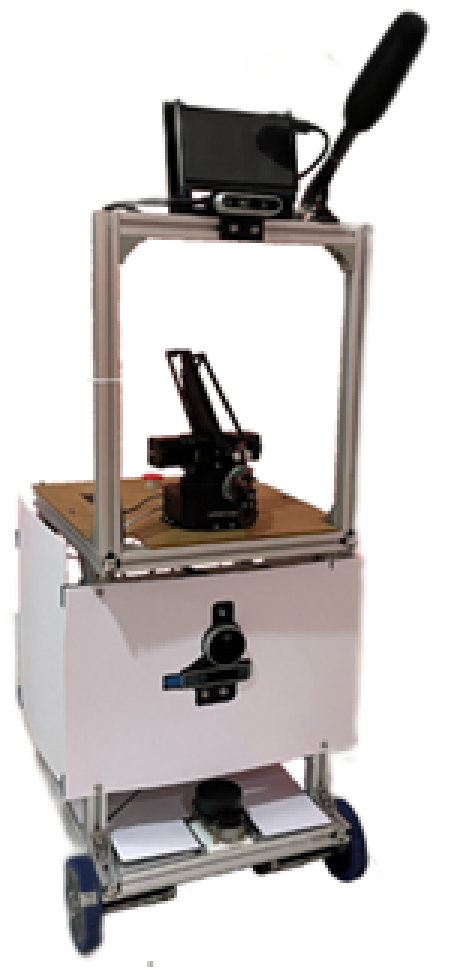
- Service robot development in home environment
Service Robot Development
- Robot Control System
- Fundamental studies to improve robot control
- Human Robot Interface
- Study on the interaction between robot and human
- Mobile Robot Manipulation
- Allowing the robot to interact with the environment
- Utilized Artificial Intelligence for manipulation
Related Publication:
- Sim, S.W., Kwan, B.H., Yap, W.S. and Ng, D.W.K., 2022, December. Development of an Autonomous Mobile Manipulator for Pick and Place Operation Using 3D Point Cloud. In 2022 IEEE 10th Conference on Systems, Process & Control (ICSPC) (pp. 280-285). IEEE.
- Yong, C.L., Kwan, B.H., Ng, D.W.K. and Sim, H.S., 2022, December. Human Tracking and Following using Machine Vision on a Mobile Service Robot. In 2022 IEEE 10th Conference on Systems, Process & Control (ICSPC) (pp. 274-279). IEEE.
- Sim, S.W., Kwan, B.H., Yap, W.S. and Ng, D.W.K., 2022. Development of ROS2-based Multi-Robot Simulation for AGVs in Factory-Like Environment. IEICE Proceedings Series, 69(SS2-5).
- Krishnan, K., Fan, T.L. and Kiat, D.N.W., 2022. Eye-Controlled Wheelchair Improves Quality-of-Life on Paraplegic Patients in Home-Care Setting: A Case Study. In Kuala Lumpur International Conference on Biomedical Engineering (pp. 37-47). Springer, Cham.
- Chuah, C.W., Kwan, B.H. and Ng, D.W.K., 2022. Point Cloud Generation with Low-Cost Camera for Visual SLAM. In Proceedings of the 11th International Conference on Robotics, Vision, Signal Processing and Power Applications (pp. 552-557). Springer, Singapore.
- Krishnan, K., Fan, T.L., Kiat, D.N.W. and Krishnan, P., 2021, December. Efficiency and Quality-of-Life in Using an Eye-Controlled Wheelchair: A Case Study. In 2021 IEEE Asia-Pacific Conference on Computer Science and Data Engineering (CSDE) (pp. 1-6). IEEE.
- Looi, C. Z. and Ng, D. W. K. (2021) “A Study on the Effect of Parameters for ROS Motion Planer and Navigation System for Indoor Robot”, International Journal of Electrical and Computer Engineering Research, 1(1), pp. 29–36. doi: 10.53375/ijecer.2021.21.
- C. L. Yong, B. H. Kwan, D. W. -K. Ng and H. S. Sim, “Optimized Machine Learning Algorithm using Hybrid Proximal Method with Spectral Gradient Techniques,” 2021 IEEE 17th International Colloquium on Signal Processing & Its Applications (CSPA), 2021, pp. 101-106
- Indirect Control of an Autonomous Wheelchair Using SSVEP BCI DWK Ng, SY Goh Journal of Robotics and Mechatronics 32 (4), 761-767
- Implementing a Brain-Computer Interface Wheelchair in Home-Care Setting: Preliminary Result K Krishnan, TL Fan, DNW Kiat, GS Yau Journal of Physics: Conference Series 1372 (1), 012020
- Jia Zhi, Lim and Ng, Danny Wee-Kiat. “Cloud based implementation of ROS through VPN”. 2019 7th International Conference on Smart Computing & Communications (ICSCC). IEEE, 2019.
Sensors
Sensor, an element that converts the change of parameters into an electrical signal, has been the driving component for healthcare applications to realize smart operation. Our working group has been working closely with the local industry to develop sensors that can be self-powered and eliminate the usage of batteries. The self-powered system harvests ambient energy, including triboelectric energy, electromagnetic, electroactive, etc, to activate the sensor continuously without the use of an external power source. This self-powered solution explores the wearable device constructed using soft and stretchable material that can be worn on human skin.
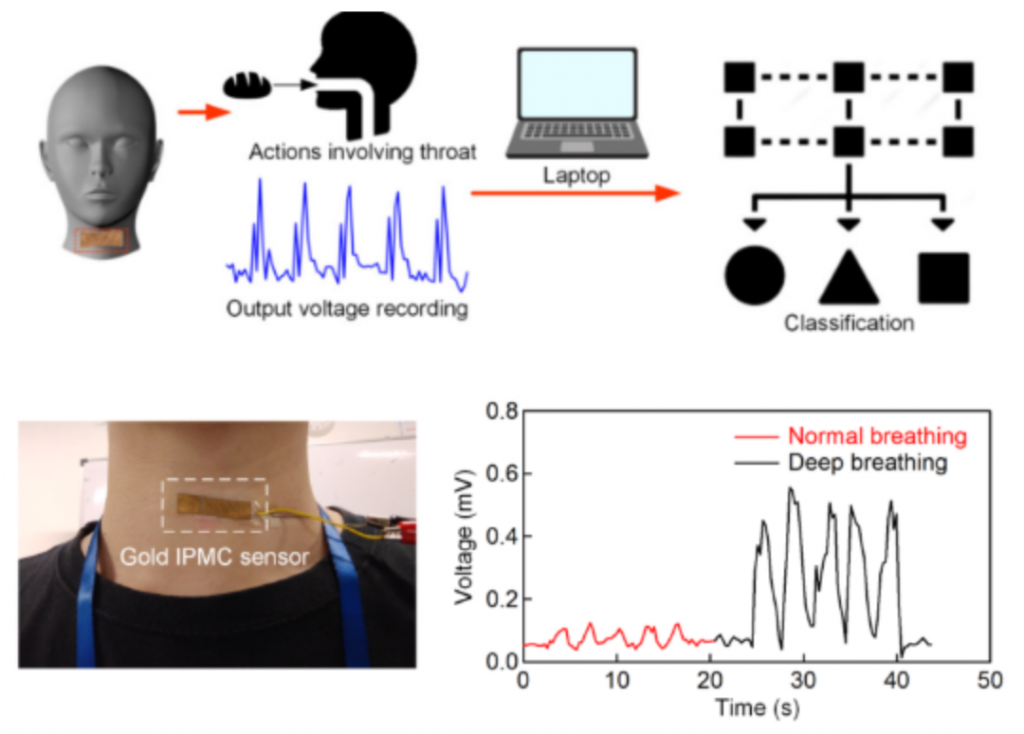
Throat sensing has received increasing demands in recent years, especially for oropharyngeal treatment applications. The conventional videofluoroscopy (VFS) approach is limited by either exposing the patient to radiation or incurring expensive costs on sophisticated equipment as well as well-trained speech-language pathologists. Here, we propose a smart and non-invasive throat sensor that can be fabricated using an ionic polymer–metal composite (IPMC) material. A support vector machine algorithm is used to train the sensor in recognizing the pattern of the throat movements, with a high accuracy of 95%.
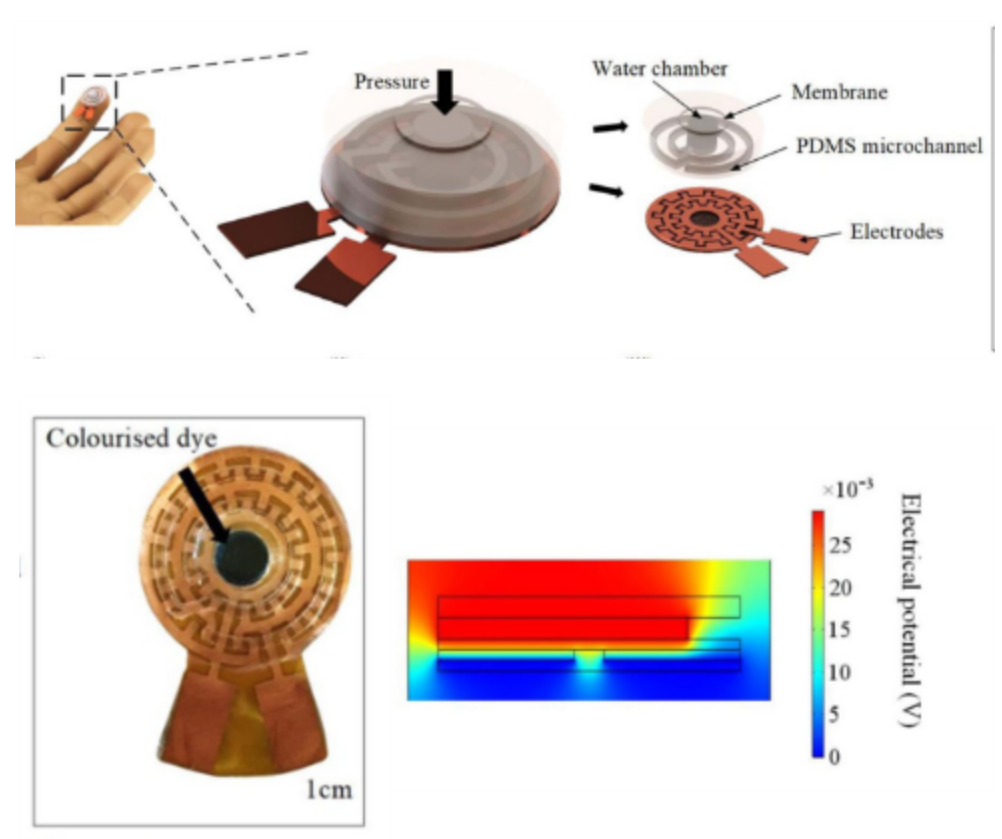
Although tremendous effort has been devoted to the development of various sensors for HMI systems, those that are made using rigid electronics have constraints in wearability, comfortability, and power consumption. In this paper, a wearable and stretchable self-powered pressure sensor is proposed based on the microfluidic triboelectric principle. Triboelectric output is produced through the charge electrification when the pre-filled liquid in the reservoir flows into a polydimethylsiloxane-made microchannel at an applied pressure. As a proof of principle in demonstrating the pressure sensor for wearable HMI application, the soft pressure sensor was attached on a human finger to function as a touch button. The touch button was then used to control a real-time light-emitting diode illumination and gaming interaction. Unlike the conventional touch button that only produces a binary output, this compact touch button can emulate a real-time impact event from the applied pressure.
Related Publications:
- Jai-Hua Lee, Pei-Song Chee, Eng-Hock Lim, Chun-Hui Tan, “Artificial Intelligence-Assisted Throat Sensor Using Ionic Polymer–Metal Composite (IPMC) Material,” in Polymers. 13(18):3041, 2021.
- Jen Hahn Low, Pei-Song Chee, Eng Hock Lim, Vinod Ganesan, “Design of a Wireless Smart Insole using Stretchable Microfluidic Sensor for Gait Monitoring”, Smart Materials and Structures, IOP Publisher, 2020.
- Qi Lun Goh, Pei-Song Chee, Eng Hock Lim, Guo Guang Liew, “Self-powered pressure sensor based on microfluidic triboelectric principle for human-machine interface applications”, Smart Materials and Structures, Vol 30, no 7, pp 07501, 2021.
Team Members:
- Ir. Dr. Danny Ng Wee Kiat (Leader)
- Dr. Kwan Ban Hoe
- Dr. Tan Chun Hui
- Ir. Dr. Chee Pei Song